What’s This Article About?
When coding for a platform for the first time, it’s tempting to assume that the platform’s standards won’t change much from what you’re accustomed to. Typically, the logic remains consistent, regardless of the programming language, compiler/interpreter, and operating system in use.
However, GPUs challenge this “standard.” When crafting a shader, its execution may vary across different machines or even on the same machine with a different OS or a distinct version of the same OS, or driver.
This article assumes you possess basic knowledge of C++, Modern OpenGL, GLSL, and matrix/vector math. If you can draw a cube and implement a flying camera using OpenGL, you should be well-prepared. Consider referring to the initial chapters of learnopengl.com to solidify your understanding of the fundamentals.
Why This Topic?
I selected this topic because, as a relatively novice GPU programmer, I’ve encountered mistakes that took considerable time to detect. These errors later caused complications in different areas, making them challenging to pinpoint and fix.
These mistakes aren’t always apparent, and on certain platforms, they may not even be considered errors. For instance, Nvidia GPUs adhere to different standards regarding memory alignment, priorities, profiling, etc., compared to AMD, or Intel GPUs.
The Problem
I wanted to create a 3D Constructive Solid Geometry (CSG) editor, utilizing Signed Distance Fields (SDF) to define shapes as mathematical functions. The approach involved sampling the values of combined objects in a 3D grid of points. I would then send the data to a Marching Cubes algorithm to construct a mesh, and eventually render it using a basic shader.
A Lot Of Big Words
Ok, let’s slow it down a bit, because that paragraph had a lot of complicated terminology which you need to understand before we go forward. I’ll explain each of these terms in detail.
CSG
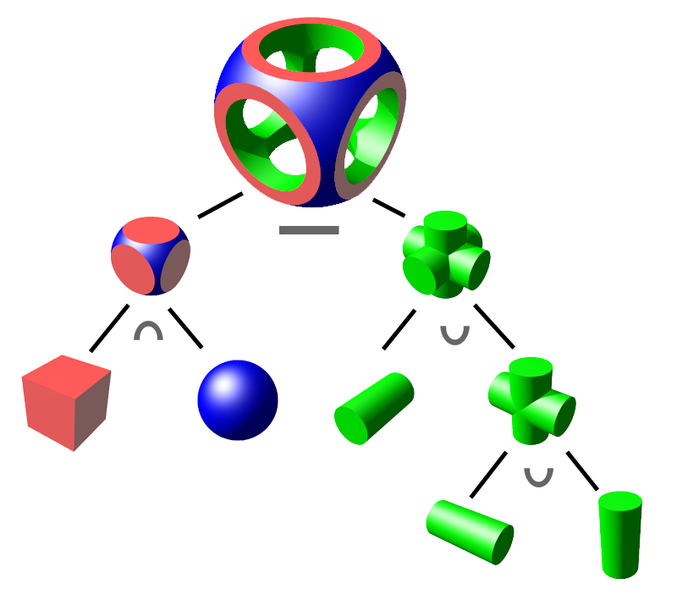
First, let’s start with Constructive Solid Geometry (CSG). CSG refers to the method of combining primitive shapes to create more complex ones. For example, you can combine a cube and a pyramid to create a house, or subtract a cylinder from a cube to create a cube with a hole in it.
Here’s a diagram showing how CSG can be used to create complex shapes from simple ones:
SDF
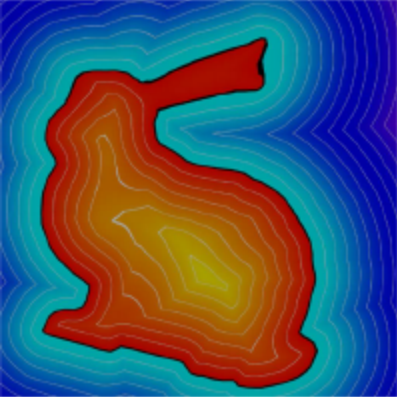
Signed Distance Fields (SDF) are a way of representing shapes as mathematical functions. The function takes a point in 3D space as input and returns the distance from that point to the nearest surface of the shape.
If the point is outside the shape, the resulting distance is positive, if the point is inside the shape, the distance is negative, with 0 being on the surface of the shape.
This picture shows a 2D rabbit represented as an SDF:
Marching Cubes
Marching Cubes is an algorithm that constructs a mesh from a 3D grid of values, approximating a solid object. Grid resolution determines the accuracy of the approximation.
The algorithm’s 2D version, Marching Squares, is illustrated below:
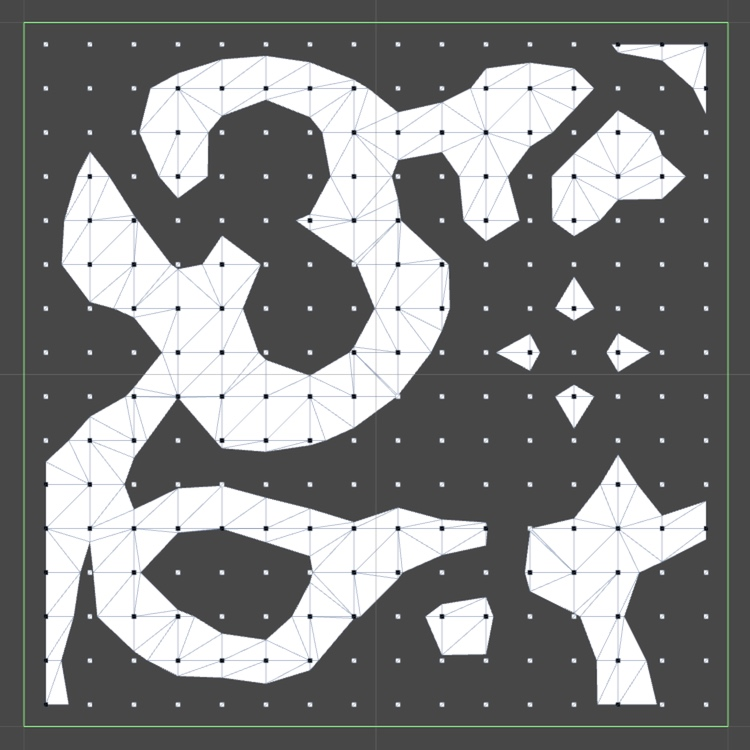
Its goal is to identify groups of black dots (representing negative values) and enclose them within a shape.
Implementation details may vary, but the core concept involves connecting “zero points” between pairs of white-black dots to form the shape. A “zero point” is the point between two dots, one positive, one negative, where the transition from positive to negative occurs.
The Problem
Below is a condensed version of the C++ function responsible for generating vertices and indices for draw order through the Marching Cubes algorithm. The original function, spanning almost 200 lines, has been significantly simplified for conciseness, and because the full version is not relevant to the topic at hand.
MeshData build_mesh(VoxelGrid voxels) {
vector<vec3f> vertices;
vector<int> indices;
for (const auto& [position, value] : voxels) {
// Calculate the "zero point" between each corner of the voxel
vec3f new_vertices[] = calculate_vertex_position_in_voxel(position, value);
// This function is the core of the algorithm, searching through a table with 256 possible vertex orders
// The large size is why I obfuscated it here; you can find a "connection table" for Marching Cubes easily
int new_indices[] = calculate_indices_for_voxel(position, voxels);
// Some vertices might not be used if the "zero point" of the corners isn't between them
vertices.emplace_back(eliminate_unused_vertices(new_vertices));
indices.emplace_back(new_indices);
}
return MeshData{ vertices, indices };
}
While this algorithm is efficient and easy to adapt for multithreading, issues arise when attempting real-time execution, generating the mesh every frame. The data sent to the GPU for drawing grows exponentially with the voxel grid resolution.
Uploading data to the GPU becomes a bottleneck, posing a challenge for real-time operation even on higher-end machines, and it’s particularly hindered by bus speeds.
The Solution
The most straightforward solution to the issue of transfer speeds between the CPU and GPU is to eliminate the need for this transfer altogether. A key advantage of this approach is that running the mesh generation code on the GPU allows us to leverage the inherent parallelism of GPUs, as they are specifically designed for such computational work.
Here is a simplified version of the compute shader responsible for generating vertex positions:
// Buffer binding for the vertex data
layout(std430, binding = 0) buffer VertexData {
vec3 vertex_data[];
};
void main() {
// The position we're currently working at
uvec3 pos = gl_GlobalInvocationID.xyz;
// Get the voxel data
float current_voxel_data[8] = generate_voxel_values(pos);
// Loop through all 8 corners of the voxel and add them to the vertex list if inside the surface
uint indices_order = 0;
for (int i = 0; i < 8; i++)
if (current_voxel_data[i] <= 0.0f)
indices_order |= (1 << i);
// Generate the zero point between each corner of the voxel
vec3 verts[12];
gen_voxel_verts(verts, pos, current_voxel_data);
// Add the vertices to the vertex list
uint indices_start = indices_order * 15;
uint output_index = data_index(pos) * 15;
for (int i = 0; i < 15; i += 3) {
uint target_index = output_index + i;
if (indices[indices_start + i] != -1) {
// Add the face, made of 3 vertices, to the vertex list
vertex_data[target_index] = verts[indices[indices_start + i + 2]];
vertex_data[target_index + 1] = verts[indices[indices_start + i + 1]];
vertex_data[target_index + 2] = verts[indices[indices_start + i]];
}
}
}
This way, the vertex_data array is already on the GPU. When drawing the mesh, we simply bind the array to the appropriate locations and execute the draw commands. Binding the buffers alone significantly reduces strain on the bus, and the CPU only needs to send draw and dispatch commands, a process much faster than transmitting millions of vertices.
Creating the buffers is straightforward in C++:
// Create and bind the buffer
glCreateBuffers(1, &vertex_buffer);
glBindBuffer(GL_SHADER_STORAGE_BUFFER, vertex_buffer);
// Allocate memory for the buffer without sending data
// Using nullptr as the last argument tells OpenGL to not send any data
glBufferData(GL_SHADER_STORAGE_BUFFER, sizeof(vec3) * num_vertices, nullptr, GL_STATIC_DRAW);
Once created, the buffer remains unchanged unless the mesh size changes. When needed, it is bound to the appropriate location, and either the compute shader generates the data or the existing data is drawn:
// Bind the buffer
glBindBuffer(GL_SHADER_STORAGE_BUFFER, vertex_buffer);
glBindBufferBase(GL_SHADER_STORAGE_BUFFER, 0, vertex_buffer);
// Calculate work group dispatch size
vec3 dispatch_size = voxel_grid_size / work_group_size;
// Dispatch the compute shader
glDispatchCompute(dispatch_size.x, dispatch_size.y, dispatch_size.z);
// Assuming the buffer is still bound in the same way, draw the mesh
// NOTE: In OpenGL 4.2 and up, the buffer must be bound to a Vertex Array Object (VAO) before drawing
glDrawArrays(GL_TRIANGLES, 0, num_vertices);
This GPU implementation offers improved speed and elegance compared to the previous version but has a few inherent challenges.
Unforeseen Problems
With the GPU implementation of the algorithm in place, running the code reveals several issues. Either the mesh fails to render, or triangles from garbage data appear across the screen, and no errors are reported in the console.
If you’re lucky, you might see a shape resembling the one intended through the visual clutter. However, its accuracy falls short of the desired outcome.
Extra Triangles
First of, let’s look at those triangles stretching in weird directions.
If you were paying attention earlier when writing the compute shader, you might have noticed that when we don’t use a vertex, we don’t simply omit it from the vertex list; instead, we skip any processing related to it.
Consequently, many vertices in the buffer remain untouched. Vertices not generated by the compute shader retain the garbage data they were initialized with.
Fortunately, this initial problem has a relatively straightforward solution. We need to clear the buffer before any data is written to it to eliminate any pre-existing garbage data. Since the clear shader is simple, I’ll show it here in its entirety:
#version 450 core
// We don't need to worry about working in 3D space here, so we can just use a 1D work group
layout(local_size_x = 64, local_size_y = 1, local_size_z = 1) in;
// The buffer we want to clear
layout(std430, binding = 0) buffer buff {
uvec3 data[];
};
void main() {
// Set the value of each element in the buffer to 0
data[gl_GlobalInvocationID.x] = uvec3(0);
}
Now all we need to do is bind the vertex buffer to the appropriate location, and dispatch the clear shader.
// Bind the buffer to the appropriate location
glBindBuffer(GL_SHADER_STORAGE_BUFFER, vertex_buffer);
glBindBufferBase(GL_SHADER_STORAGE_BUFFER, 0, vertex_buffer);
// Dispatch the clear shader
glDispatchCompute(num_vertices / 64, 1, 1);
Although the buffer is of type uvec3 (containing 3 unsigned integers) rather than vec3 (containing 3 floats), it does not impact the process. Both floats and unsigned integers are 32 bits long, and using unsigned integers simplifies the operation without compromising functionality.
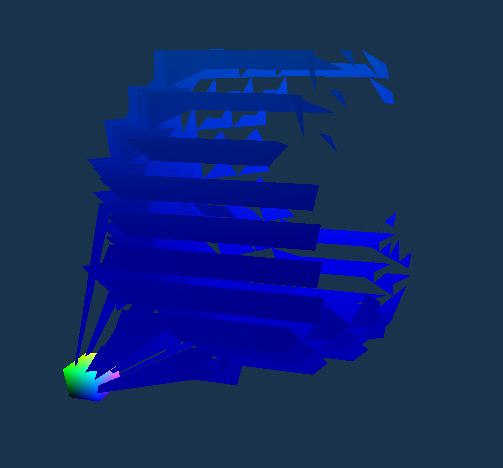
Good, we fixed it, and when we run it, we get a mesh that looks like this:
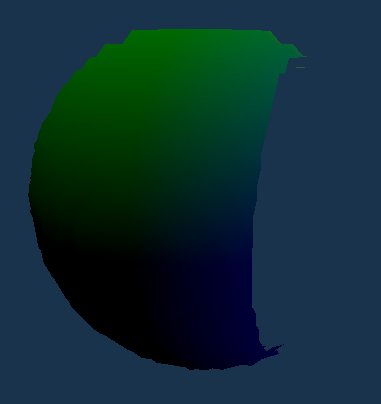
Wait, it’s still broken? What’s going on?
Memory Alignment
At least we don’t get all those garbage triangles anymore, but now there’s an entire section of the mesh missing. It’s worth noting that the missing piece consistently appears in the same location and maintains the same size, assuming the voxel grid size remains constant.
If you’ve followed online instructions on using compute shaders, you might have defined buffers in the compute shader like this:
layout(std430, binding = 0) buffer VertexData {
vec3 vertex_data[];
};
Technically, this is not incorrect, and it might seem to work on NVidia GPUs or select AMD GPUs. However, the underlying problem arises from how different GPUs handle memory alignment, compounded by the lack of a concrete standard in OpenGL for memory alignment, leaving room for interpretation by GPU manufacturers.
The primary issue lies with std430, a layout qualifier that only loosely specifies that memory should be tightly packed. However, OpenGL allows different rules, especially for vec3, which is the type used for the vertex buffer.
For example, Intel GPUs will align the 12 byte vec3 buffer to 16 bytes, resulting in a structure like this:
[ X Y Z _ X Y Z _ X Y Z _ X Y Z _ ]
Here, _ represents an empty space equivalent to the size of a float (4 bytes).
A more defined standard is std140, which mandates that vec3, along with other types, should be aligned to 16 bytes, regardless of their size.
While it retains the less efficient alignment of a vec4, introducing some empty space, this alignment rule is no longer inconsistent across different GPUs.
To rectify this alignment issue, we need to do 2 things:
- Change any occurrence of
std430withstd140Here’s the modified shader alongside the original one:
// Old
layout(std430, binding = 0) buffer VertexData {
vec3 vertex_data[];
};
// New
layout(std140, binding = 0) buffer VertexData {
vec3 vertex_data[];
};
- Allocate memory for a buffer of vec4 instead of vec3. Here’s the modified line alongside the original one:
// Old
glBufferData(GL_SHADER_STORAGE_BUFFER, sizeof(vec3) * num_vertices, nullptr, GL_STATIC_DRAW);
// New, with the size of vec4 instead of vec3
glBufferData(GL_SHADER_STORAGE_BUFFER, sizeof(vec4) * num_vertices, nullptr, GL_STATIC_DRAW);
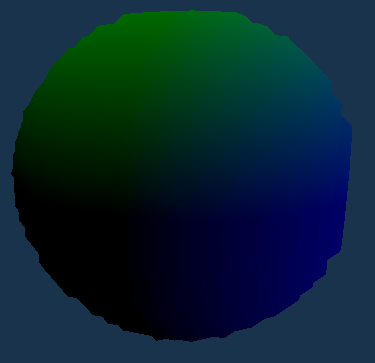
With this simple adjustment, the resulting mesh now looks like this:
What Did We Learn?
The main takeaway from this article is that GPUs are very powerful tools, but programming for a GPU requires more attention to the specifications of the APIs that you use than with more traditional programming methods.
Graphics APIs like OpenGL and Vulkan are designed to be cross-platform, but the specific GPU drivers that implement them, by definition, are not. This means that, even with the best efforts of the API developers to ensure consistent rules, some manufacturers may interpret the rules differently, resulting in unexpected behavior.
Ok, Now What?
With this functional version of the algorithm, we can now generate real-time meshes and dynamically modify the voxel grid, enabling the creation of a CSG editor.
While the UI serves as fluff, the heart of the editor (and the focus of this article) is the GPU implementation of the Marching Cubes algorithm. This implementation enables real-time rendering of objects, providing immediate visual feedback as changes are made.
SDFs are straightforward enough to only account for a small portion of the time needed to render objects. Therefore, ensuring the efficiency of the Marching Cubes algorithm was crucial.
If you’re a beginner, and you’re interested in learning more about GPU programming, I recommend checking out learnopengl.com. It’s a valuable resource for mastering OpenGL, serving as a major reference during the creation of this article and my introduction to graphics.
For those seeking more advanced courses or tutorials, Vulkan presents a compelling alternative to OpenGL. As a more modern API, it offers robust capabilities. However, it comes with increased complexity and is not as beginner-friendly as OpenGL.
One of the advantages of Vulkan, however, is that the API specification is more rigid, and the rules are more clearly defined. This consistency across different GPUs makes Vulkan a more attractive option for those seeking to create cross-platform applications, and problems like the ones described in this article are less likely to occur (although not impossible).
